
A Canadian Inventor has Developed an Autonomous Flying Umbrella that Hovers above your Head eliminating the need to hold a handle
Key Takeaways:
•Canadian Inventor Creates an Autonomous Self-Flying Rain Umbrella
•This Innovative Umbrella Uses advanced Computer Programming and Drone technology to protect its users from Rainfall without ever needing to juggle an umbrella handle
•Self-Flying Umbrella took this Canadian Inventor over 2 Years to successfully build
The creator of the popular YouTube channel “I Build Stuff” John Tse dedicated almost a full year to developing an innovative hands-free flying umbrella. His goal was straightforward yet challenging: design an umbrella that hovers automatically above the user, eliminating the need to hold it manually.
The development journey was anything but straightforward. Countless setbacks plagued the process, including fried electronics and finicky connections. At one stage, a Raspberry Pi was completely ruined, and the camera links repeatedly failed, demanding ongoing fixes. These hurdles slowed progress but ultimately led to a more robust final product.
Through sheer determination and endless experimentation, the project came to life as a whimsical yet practical flying umbrella. It autonomously trails its builder—even through pouring rain—offering an entertaining, behind-the-scenes glimpse into the ups and downs of ambitious DIY drone builds. The story serves as a powerful reminder that real success often comes not from flawless execution, but from refusing to abandon a bold idea until it actually works.
Meet the Autonomous Flying Umbrella
Imagine stepping out into a downpour without ever needing to juggle an umbrella handle while checking your phone, carrying groceries, or simply keeping your hands free.
Talented maker and YouTuber known as John Tse, behind the popular “I Build Stuff” channel, has turned this sci-fi fantasy into reality with his innovative Flying Umbrella 2.0 a fully autonomous drone-powered umbrella that hovers directly above your head and follows you wherever you go.
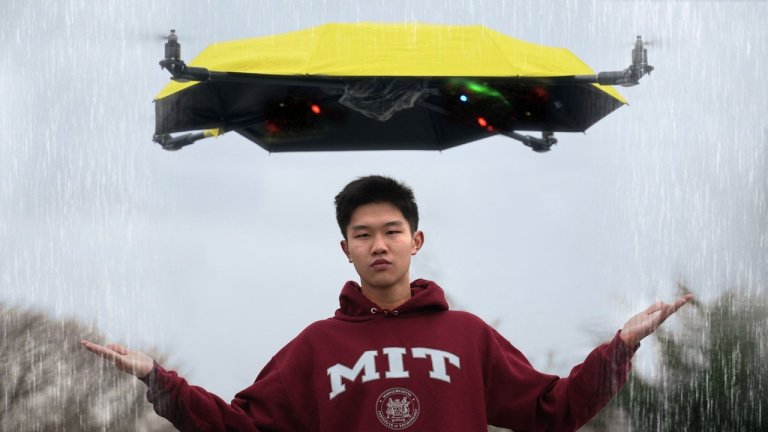
Canadian Inventor John Tse Testing his Flying Umbrella – Image Source Youtube
At its core, the system is a clever fusion of everyday umbrella design and advanced drone technology. Onboard cameras, including a sophisticated time-of-flight (ToF) depth-sensing camera mounted underneath.
How the Flying Umbrella Actually Works
Fundamentally, the device is a quadcopter drone cleverly integrated beneath a standard umbrella canopy. Four propellers deliver lift and directional control, supported by a lightweight, custom 3D-printed internal frame. An onboard computer constantly interprets sensor inputs and interfaces with the flight controller, enabling real-time positional corrections so the umbrella stays aligned directly above the person.
Flying umbrella uses advanced sensors and custom autopilot software to continuously track the user’s movements—specifically detecting the top of their head in real-time 3D space. A compact Raspberry Pi processes this data on the fly, sending precise instructions to the flight controller, which adjusts the four propellers (arranged in a quadcopter-style frame hidden within the umbrella’s structure) to keep the canopy perfectly centered overhead. The result? Seamless, hands-free protection from rain or even harsh sunlight as you walk, run, or navigate open spaces.
Why the Initial Version Didn’t Cut It (Version 1.0)
The original Flying Umbrella (version 1.0) depended almost entirely on manual operation. The user had to constantly guide and correct its position using a controller, making it cumbersome and inconsistent in real-world conditions. The creator soon understood that genuine usefulness would require full autonomy, free from ongoing human intervention.
Major Improvements in Version 2.0
The key advancement in the updated model lies in its intelligent user-tracking system. A time-of-flight (ToF) camera is positioned under the canopy. This sensor emits pulses of light and calculates distances by measuring how long the light takes to bounce back from objects below. By examining the phase differences in the reflected signals, it generates a precise 3D depth map of the area.
An onboard computer vision algorithm then identifies the top of the user’s head from this depth data. The system relays this information to the flight controller, which makes constant micro-adjustments to keep the umbrella perfectly centered overhead. When not in use, the entire assembly collapses compactly like a conventional umbrella, making it easy to bring indoors.
The true breakthrough, however, was achieving reliable autonomous hovering and following. The maker already knew how to make things fly; the real challenge was making the device shadow a person without any input. To refine the tracking safely, he first constructed a smaller-scale test drone. This allowed extensive trial-and-error without endangering the full-sized umbrella structure.

A drone-powered umbrella that hovers and follows you in the rain is now real
Early tracking attempts included standard cameras and GPS, but these proved inadequate. The final solution—a time-of-flight depth camera—excels by producing detailed 3D images rather than flat 2D ones. It performs well even in dim conditions, such as under the umbrella during rainy weather. A Raspberry Pi analyzes the depth information in real time to locate the user’s head and commands the flight controller to adjust direction and position accordingly.
On the hardware front, the build incorporates a Pixhawk flight controller paired with a Raspberry Pi Compute Module 4. This setup connects to an Arducam ToF camera, which actively illuminates the scene rather than relying on ambient light—crucial for the shadowy environment beneath a rainy-day umbrella. The processed head position data then drives the quadcopter-style movements to maintain ideal coverage.
This latest version represents a major leap forward from the original 2024 prototype, which, while impressive, still required manual control via a handheld remote drawing plenty of feedback from viewers who pointed out how impractical that made it for real-world use.
The new autonomous model ditches the controller entirely, relying on real-time computer vision and human-aware tracking algorithms to fly independently. It’s a clear step toward the broader vision of personal robotics: devices that intuitively understand and adapt to human movement rather than demanding constant input.
Overcoming Setbacks and Limitations
The project encountered numerous obstacles: broken parts, software glitches, loose connections, and complete system overhauls. After nearly 365 days of persistent effort, the autonomous flying umbrella finally delivered. It hovers steadily, follows its user reliably, and even operates effectively in heavy downpours. While far from perfect, it successfully transformed a creative concept into a working prototype.
Testing explored various approaches, from basic cameras and LiDAR sensors to more unconventional (and humorous) ideas like a remote human spotter.
Short video clips of the umbrella in action quickly went viral on platforms like X (formerly Twitter), earning admiration for its ingenuity while sparking debates about its practical value in daily life. Some viewers see it as an exciting preview of future personal robotics, while others regard it as a delightful novelty best appreciated in the realm of experimentation. The device is not available for purchase and is not meant to replace ordinary umbrellas. Instead, it showcases how accessible drone technology and DIY robotics now empower individual makers to create sophisticated autonomous machines that were once confined to professional research labs.
Youtube Video showing Canadian Inventor John Tse Flying his Self Controlled Umbrella in the Rain
Of course, turning a hovering umbrella into a reliable everyday companion isn’t without hurdles. The team is currently zeroing in on two key challenges: latency (tiny processing delays that can cause the umbrella to lag behind a person’s natural walking pace) and flight stability (ensuring smooth, wind-resistant hovering even in less-than-perfect conditions).
Practical Considerations
Despite its impressive capabilities, the flying umbrella is still a prototype with clear limitations. Flight time is modest—typically 10 to 15 minutes on a single charge, comparable to many small consumer drones. Strong winds can disrupt stability, and heavy sideways rain may reduce effective coverage. For safety, the system is programmed to maintain a distance of several meters above the user.
Refining response times and fine-tuning the algorithms is the top priority right now, with the goal of delivering that buttery-smooth, almost invisible following experience users crave. Additional refinements include a foldable carbon-fiber frame for portability—it packs down into a backpack-friendly size and robust stabilization to handle light rain without compromising performance.
Beyond the wow factor, this project highlights exciting possibilities for personal mobility and accessibility. It could prove especially valuable for the elderly, people with mobility challenges, parents juggling strollers and bags, or anyone tired of the constant umbrella shuffle on rainy commutes. As a DIY build using off-the-shelf drone parts, 3D-printed components, and open experimentation, it also embodies the maker spirit by showing how accessible technology and persistence can create something truly magical.
This project stands as a testament to creative engineering and the rewarding (if frustrating) nature of long-term maker challenges.
While Flying Umbrella 2.0 isn’t a polished commercial product yet (the creator himself notes it’s not perfect but brings immense joy in testing), it’s a tantalizing glimpse into a future where our gadgets don’t just assist us—they anticipate our needs and move with us. Watch the full build and flight tests on the I Build Stuff YouTube channel for the behind-the-scenes journey. Who knows? Your next rainy-day essential might just fly into your life on its own.




Leave a Reply